東 日 本 大 震 災
行方不明者捜索活動協議会
東日本大震災行方不明者捜索活動協議会2016
2. 名取市閖上地区における地中レーダを活用した捜索活動の状況報告
(1)「レーダ技術を用いた地中探査による震災不明者捜索について」
仙台高等専門学校教授 園田 潤 / 東京電機大学准教授 渡邉 学
東京電機大学の渡邊と申します。
飛行機や人工衛星を使って砂浜を捜索した経緯について、ご報告させていただきます。
航空機レーダによる砂浜観測
サイトタイトル
私はそもそも飛行機や人工衛星にレーダを載せて取得された画像を解析する専門家ですが、レーダは電波を出してかえってきた信号から画像を作りますが、レーダというのは物質を透過することができまして、もちろん地表面にある物も見えますが、地面が乾燥していれば、地中の物もある程�度見ることができます。こういう性質を使うと、本当に乾いた砂なら1メートル程度。これまでSTEPさんと続けてきた捜索の中では、だいたい砂浜では30~40センチくらいの深さの物も見えていきそうだということが分かっています。


合成開口レーダ(SAR)
(電波を送受信して画像を作成)
© ダイアモンドエアサービス
地表面の物体
地中に埋まった物体
見える範囲
乾いた砂:1m程度
砂浜:30~40cmの深さ
この技術を使って不明者捜索など何か役立つことはないかと考えていました。下記画像のように、閖上の砂浜の画像を光学画像で見たときとレーダ画像で見たときとで比べますと、光学画像で見れば当然、砂浜の表面にあるものしか見えず、閖上浜はほとんど表面に何もない状態ですが、レーダで画像を見てみると、何も表面にないような砂浜でもレーダでピカピカ光っている所があります。こういう箇所で何かしらの埋没物が埋まっている可能性があるのではないかということで、2013年から仙台高専の園田先生と一緒にピカピカ光っている箇所の捜索を始めました。園田先生は地中レーダの専門家なので、こういう場所に行って何か埋まっている物があったら二人で取り出すということを行なっていました。ただどうしても二人でやっていても、なかなか成果としてはかどりませんでした。
レーダ画像
砂浜で明るく輝く場所がある。
⇒ 埋没物からの反射?
光学画像
砂浜表面しか見えない


2012年~2014年撮影
@JAXA
レーダ画像明るい場所と暗い場所の埋設物の違い
地中レーダの詳細はこのあと園田先生から説明していただくことにしますが、実際にレーダで明るく光っている所に物が埋まっているかどうか実験したのがこちらのものになります。こういう明暗のある所に赤い線を引いてレーダで明るく光っている所とあまり光ってない所の砂浜を比べました。


下のグラフですが横軸が埋設物の個数を表し、縦軸が埋没物が埋まっていた深さを表します。
成果の一つとしまして、陸側の明るい場所では2,400個ほどの物が埋没しており、海側の暗い場所では数にすると900個程度とうことが確認できました。やはり、レーダで明るく光っている所が、かなり多くの物が埋まっているという感触がわかったってきました。





2014年からはSTEPさんと協働して捜索することができまして、それから非常に効率をあげることができるようになりました。
それ以降、閖上浜では「女川市場」と書かれている大きい海水槽であるとか、家の梁とおもわれるような木材が見つかったり、鳥の骨かと思われるものが地中レーダ探査により発見されています。
捜索の現状
現在のところ、みなさんのご協力もありまして、青い点線で囲まれたエ�リアの捜索が終わっていますが、この辺り以外にも赤線で囲われたエリアなどの砂浜で明るく輝いているところがあるので、継続して捜索を続けていきたいと思っております。

地中レーダの概要
仙台高専の園田と申します。よろしくお願いします。
私からは地中レーダを使って実際に砂浜で捜索した結果と今後についてのお話をします。
今日お話するのは二つありまして、最初はまず、地中レーダによる行方不明者捜索の現状としまして地中レーダの概要などや、2015年の9月から月に1回おこなっております閖上浜における地中レーダの結果、ここでは統計をとっておりますので、掘り当てた物の例や個数などを報告します。
二つ目が、今後についてですが、レーダの識別を人工知能を使用し自動的におこなう技術。
自動走行する地中レーダを開発中ですので、それご覧いただいたり、その他に砂浜だけでなく私たちがしていることを水中の捜索に応用できないだろうかとかという検討などの今おこなっていることについてご説明します。
数百MHz の電波を地中に入射し,地中の誘電率(水分率)の相違による反射波を地上で観測
誘電率差が大・大きさが大・浅部ほど検出されやすい
地中レーダの例:RAMAC(MALÅ Geoscience 社)


500MHz@閖上浜
シールドアンテナ
(上:500 MHz,下:800 MHz)
閖上浜でのレーダ画像
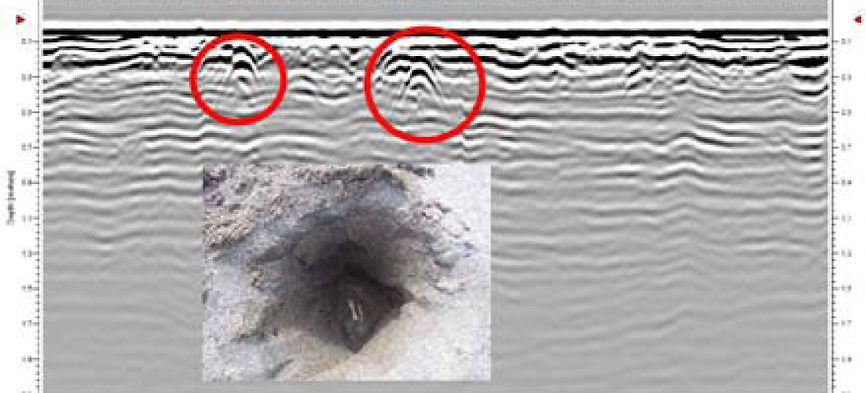
実際に、閖上浜で例えばご遺骨が埋まっていた場合どういうふうに見えるかを手羽元の骨を実際に深さ30センチのところに埋めてみまして、それを地中レーダで上から撮ったのが下の画像になります。この赤い丸が、埋めた手羽元の骨ですが、このように手羽元の骨がくっきりと見えます。
私たち理論計算やってまして、理論計算の結果、深さ1メートルくらいにあるお骨は検出可能ということがわかっています。
赤丸印部分が深さ30 cm の手羽元の地中レーダ画像
理論計算より深さ1 m程度のお骨は十分検出可能
もともと私たちは2013年の3月からやっていたんですけども、実際にこの地中レーダを使って大勢の人で行うことで、より広い範囲を捜索でできるということを思い、2015年の9月からSTEPのみなさんと一緒にだいたい月1回程度活動しています。これまで31回実施しまして、延べ732名で、6717平方メートルを捜索して37,417個を運び出しています。広さですけど具体的にイメージしにくいかと思います。コボスタジアム宮城のグラウンドのだいたい半分くらいになります。これくらいを1年とちょっとくらいでさがしている。下の写真が実際に捜索している風景です。地中レーダ探査は、地中レーダを引っ張って行い、地中レーダの画像でここに何かありそうだという所に竹の棒を刺して、そこに深さの印を洗濯バサミをつけて、そこを掘ってもらうということでおこなっています。今、地中レーダは、カート付きが2台と引っ張るのが1台、3台あり、たくさんの方に来ていただけると、3台フル活用して捜索できる環境を整えています。
2015 年9 月から月1 回程度でこれまで31 回実施
延べ732 名で6,717 m2 を捜索し37,417 個を発掘




木や石の中に生活用品も
実際、私たちが掘り出したものは、木や石などが多く、中にはサンダルや玩具、名前の入ったもの、眼鏡ケースに、子供さんの帽子などかが見つかったり、庭で水を撒くときに使うホースに、プロパンガスとか、洗濯機の蓋、それ��以外に2011年製造と書いてある震災前か後かわかませんが、日付の分かるものなどが地中の中から出てきています。









検出物の統計量(深さ・種類)
下のグラフは統計とったもので、STEPの皆さんに集計していただいていて、左のグラフは、どれくらいの深さから何個の物が出てきたかがわかるグラフです。横軸が深さで、縦軸が個数になります。60センチより浅い所で多くの物が見つかっていて、80パーセント以上の物が深さ60センチの所から見つかっているということがわかっています。もちろん、深い所でもありまして、1メートル以上の所からもあります。次に右のグラフは種類がわかるグラフです。横軸が種類で、縦軸が個数となります。先ほど述べた通り木や石など、ビニールや貝とかが多いですが、そのなかでも17片のお骨、これは動物だという話です�が、17個のお骨が地中レーダーで検出して実際に見つかっていますが、まだ具体的に手がかりとなるものを見つけられていないので、これからもう少し工夫して捜索していかないといけないなと考えています。

80 %程度が深さ60 cm から

木や石などが多いなか骨片17 個を検出
地中レーダによる不明者��捜索の今後
地中レーダ画像からの物体識別は、現在の地中レーダでは物体の「有無」と「深さ」のみ
⇒人工知能による物体の「種類」と「大きさ」の識別


砂場の埋設実験の地中レーダ画像(地中の断面に相当)
※左から深さ30cm の幅10cm・20cm の空洞,1cm 径の金属管
人工知能による物体の「種類」と「大きさ」識別の正解率
今後についてですが、地中レーダを使って捜索していますが、現在の地中レーダは物体の有り無しと深さがわかますが、左下の画像が実際の地中レーダの画像で、横軸が水平位置、引っ張った位置、縦軸が深さに相当するもので、地中の断面に相当するものなんです。物体があると、双曲線状の反射波が出てくるので、何かがあると、どのくらいの深さに何かがあるとわかっていましたが、それが何なのかわかりませんでした。これを今は全部掘ってもらっているという状況なので、なかなか数が多いと大変だということで、最近、巷で�話題になっている人工知能(AI)で、物体の種類と大きさを識別したいということで自動識別の研究もおこなっています。
まだテスト段階ですが、実際に人工知能を使って物体の種類と大きさを識別できるかという結果を示したものが右上の図です。これは、たくさん地中レーダの画像を見せて学習させ、この時はこうなるというのを沢山勉強させるわけです。緑が幅で青が高さとなります。これらが大きさになります。これを見ていただくとコンピュータがたくさん画像を学習させれば学習させるほど正解率は上がっていくことがわかります。ここに不均質媒質と書いてありますが、実際に地中はたくさんの物体があり不均質の状態になっていますので、それを再現して実験してみた結果なんですが、材質はだいたい9割くらいまで判別できており、大きさも8割までコンピュータは自動的に識別できるのではないかというところまできています。これを実際に閖上浜の捜索に利用させ、本当にこの程度の大きさの金属があるのか衣服などがあるということが分かれば、その個所のみを掘り捜索すればいいので、今よりは発見する率が上向上するのではないかと考えます。
閖上浜は広大で人手による人海戦術では時間を要する
⇒広域の自動レーダ捜索を可能とさせ、GNSS 自律走行地中レーダによる自動広域捜索
次は、先ほど申し上げた通り、捜索できた範囲というのがコボスタジアム宮城の半分程度にとどまっているので、何とか広範囲を捜索したいので自動走行する地中レーダを考えています。左下の写真は、少し簡単ですがプロトタイプの自動走行車を作ってみました。これはGPSやGNSSを使って自分の位置を捕捉したり、あとは方位センサを搭載した走行車で、自分が今、どの位置に向かっているのかがわかるセンサを搭載していたり、それから自分の車体の傾きがわかる3軸の傾きセンサを実装しています。この3つのセンサを付けて指定した範囲を走りなさいという走行車を制作しています。
右下の写真は、実際に砂浜を走行した例ではありません。実際にこの範囲を捜索した際、自動的に自分で走行して、地中レーダの画像を取得してくるというものを作りたいと思っています。


人工知能搭載GNSS 自律走行地中レーダによる自動探査
(GPS/GNSS 測位モジュール,方位センサ,3 軸傾きセンサ搭載のテスト機)
下の画像は仙台高専ですが、白い線が人間がここからここを回ってと指定したルートを、先ほど紹介した走行車が走れるか試したものなんです。この黄色い線が自動走行車が走ったものですが、現在、これくらいの精度で走行します。使用しているGPSやGNSSもセンサがまだ上等なものではないため、それらをもう少し精度を高めれば自動走行する地中レーダが作れるのではないかと思っています。

開発中のGNSS 自律走行車のテス�ト
最後は、水中の捜索ということで、砂浜だけでなく海も捜索する必要があると私も前から思っています。淡水の湖底を地中レーダを使った探査の情報を得ています。右下の画像をみますと湖底にヘドロなどが見えているのが分かります。これは湖底の反射波なんですけど、実際にこのように見えています。海中は書いてある通り電波の減衰が大きいので難しいと思いますが、淡水で、塩分濃度が低い状態なら見えるのではないかと思います。今は、水深3メートルくらいの湖底を80センチ程度まで観測できたという例がありますので、例えば先ほどの閖上の広浦湾など比較的海中の塩分濃度が低い所ではこれを使用し、海底のヘドロ堆積量が見えるのではないかと思います。
レーダ技術の水中捜索への応用
⇒砂浜だけでなく海などの水中捜索も必要
湖底(淡水)のレーダ探査の例
⇒海水は電波の減衰が大きいので適用不可


湖底のレーダ探査(仙台測器・応用地質提供)
(水深3 m程度の沼底80 cm 程度まで観測できたとのこと)
水中捜索への応用
⇒上空・地上の複合レーダ手法の水中捜索への応用
広域をサイドスキャンソナーで捜索,何かありそうな箇所をROV で調査,実際にダイバーが精査
ROV(水中カメラ)による海底調査の例
上:自作機,下左:SEA 社デモ機(上:女川町,下:山元町)






最後になりますが、もう一つ、先ほど、渡邊さんがおっしゃってました上空からざっと探してそこから反射があるところをレーダで細かく探すという複合レーダの手法を海中でも適応できないかという考えが浮かびます。広域をサイドスキャンで探査し、可能性のある箇所を水中カメラシステム(ROV)で確認。更に可能性が高いと判断した場所へ実際にダイバーさんに潜っていただければ、ダイバーさんの負担も減ると考えます。上段の画像は、私たちが制作した少し安っぽい水中カメラで撮影した女川の海で撮ったものです。ある�程度見えることがわかりました。これですと海流の早い所で使えないので、下の画像のような高性能なROVを(株)SEAさんからデモ機をお借りして検証を進めています。
以上で私から現状と今後ということで発表を終わります。